Autonomous UAV Navigation for Personnel Recovery
Overview:
Contributed to a U.S. Air Force–funded project on autonomous UAV navigation in GNSS-denied environments, supporting Personnel Recovery (PR) and Combat Search and Rescue (CSAR) missions. Focused on multi-UAV coordination and robust, high-accuracy localization in degraded environments. Tuned an error-state extended Kalman filter (EKF) for UAV state estimation and implemented MAVROS/Ardupilot-based autonomous control to enhance operational effectiveness in critical rescue missions.
Key Achievements:
Refined EKF for precise UAV localization.
Programmed autonomous navigation for coordinated multi-UAV missions.
Skills/Tools: EKF, UAV Autonomy, MAVROS, Ardupilot, ROS

UGV-UAV Cooperation for Subterranean Exploration
Overview:
Contributed to a National Geospatial-Intelligence Agency (NGA)–funded project on cooperative UGV–UAV exploration in subterranean environments. Integrated UAV localization within a UGV reference frame to enable precise mapping and navigation in GPS-denied tunnels and caves. Focused on EKF-based state estimation to deliver accurate UAV trajectories and support resilient multi-robot autonomy for underground search and rescue missions.
Key Achievements:
Achieved 3D localization RMS error <0.6 m over UAV flight trajectories >20 m in subterranean trials.
Enabled coordinated UGV–UAV exploration for underground mapping in realistic tunnel environments.
Advanced autonomous multi-robot capabilities for GPS-denied search and rescue scenarios..
Skills/Tools: EKF, Multi-Robot Localization, Subterranean SLAM, UAV/UGV Integration

SLAM Applications for Underground Mining Safety
Overview:
Contributed to a grant-funded project from the Alpha Foundation focused on improving underground mining safety through autonomous robotic systems. Developed methods to evaluate SLAM map quality and completeness, integrating LiDAR (L515) and visual (T265) data to generate accurate 3D maps for structural assessment of mine pillars and roofs. Enabled reliable monitoring of hazardous conditions to support early-warning systems for miners.
Key Achievements:
Quantitatively evaluated SLAM map accuracy and completeness in underground mining environments.
Processed real-world underground datasets to produce 3D maps for mining safety analysis.
Advanced autonomous mapping techniques for early hazard detection in subterranean operations.
Skills/Tools: LiDAR, Visual SLAM, Point Cloud Registration, 3D Mapping

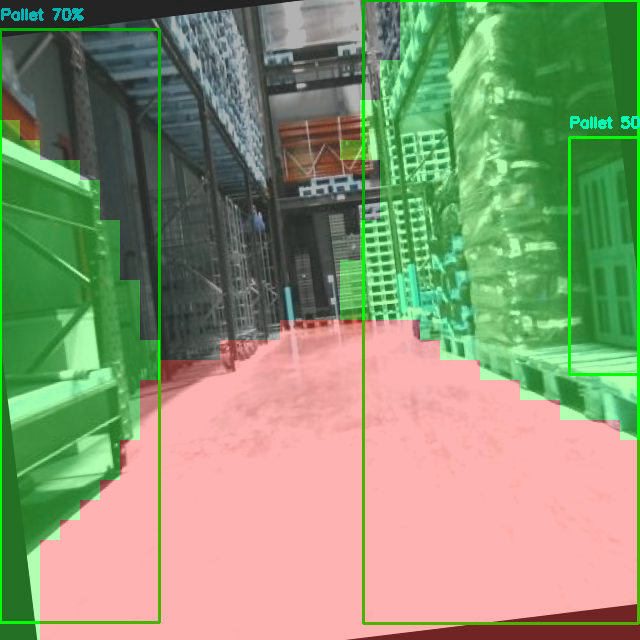
Pallet Detection & Segmentation
Developed a ROS2 package for real-time pallet detection and semantic segmentation in manufacturing and warehouse environments. The system integrates YOLOv11 for object detection and SegFormer for pixel-wise segmentation of pallets and ground surfaces, using both image and depth data. Models were trained and fine-tuned on custom annotated datasets to ensure robustness under varying environmental conditions.
Skills/Tools: ROS2, Python, PyTorch, YOLOv11, SegFormer, Roboflow, Data Augmentation
Robot Motion Planning
Developed motion planning algorithms for 2D and non-holonomic robots as part of coursework. Implemented graph search methods (BFS, Dijkstra, A*) and sampling-based planners (PRM, RRT, RRT*), including Dubins paths and trajectory optimization to generate smooth, feasible paths.
Skills/Tools: MATLAB, Graph Algorithms, Sampling-Based Motion Planning, Trajectory Optimization

Differential-Drive Robot
Built a differential-drive mobile robot using ROS for SLAM. The robot navigates using a unicycle-model PD controller along waypoints computed by an A* path planner on a lidar-based occupancy grid. State estimation is performed with an Extended Kalman Filter that fuses lidar, wheel odometry, and IMU data.
Key Features:
Motor control via a C++ rosserial node on Arduino.
Python ROS nodes for IMU, lidar pose measurement (ICP), sensor utilities, mapping, and EKF-based state estimation.
Visualization and SLAM monitoring in RVIZ.
Skills/Tools: ROS, Python, C++, Arduino, LiDAR, IMU, EKF, SLAM, Motion Planning
